

緊急救命避難支援システム (ERESS)
~ モバイルアドホックネットワークの災害への応用 ~
長年、世界各地において火災やテロなどの突発的な災害が発生しています。
近年、国際情勢の不安により、これらの災害が多発しており、多くの死傷者が出ています。
火災やテロによる死亡理由の半数近くは、逃げ遅れによるものです。
そこで私達は、これらの問題を解決するシステムとして、緊急救命避難支援システム(ERESS: Emergency Rescue Evacuation Support System)の
開発を行っています。本システムは、携帯端末保持者の行動分析を行うことにより災害を自動検知し、避難誘導を行うシステムです。
本システムは、携帯電話やスマートフォンなどの携帯端末同士がMANET (Mobile Ad-hoc NETwork) 通信により情報交換を行い、
周囲の情報を端末ごとに収集・分析します。これに基づき、リアルタイムに災害情報を提供し、端末の画面に適正な避難経路を表示することにより、
迅速かつ的確な避難誘導を行います。本システムは以下の5つの機能から構成されます。
◆機能1: 携帯端末のみによるモバイルアドホックネットワーク
携帯端末のみでネットワークを構築し、周囲の他端末と情報の交換・共有を行います。
また、携帯端末のみで通信を行うため災害発生時においてもリアルタイムに通信することが可能です。
◆機能2: 各携帯端末保持者の行動分析
各種センサを搭載したERESS端末を利用して端末保持者の行動を分析し、通常状態と非常状態の判定を行います。
◆機能3: 災害発生検知
各端末保持者の状態についての情報を収集し、災害を自動検知します。
非常状態となる端末数が全体の端末数の過半数以上となると災害発生検知となります。
◆機能4: 避難経路探索
ERESS端末で収集されたデータをもとに、リアルタイムに避難可能な避難路を検索します。
複数の避難路がある場合には、被災者を各経路に分散させながら経路誘導を行います。
◆機能5: 避難経路の表示・誘導
ERESS端末の画面に避難路を表示し、被災者の避難誘導を行います。画面表示だけでなく、音や振動によっても直感的な誘導を行います。
下図に火災発生時におけるERESSの動作イメージを示します。機能1から5が連携して火災の発生直後に発生検知および避難誘導を行います。
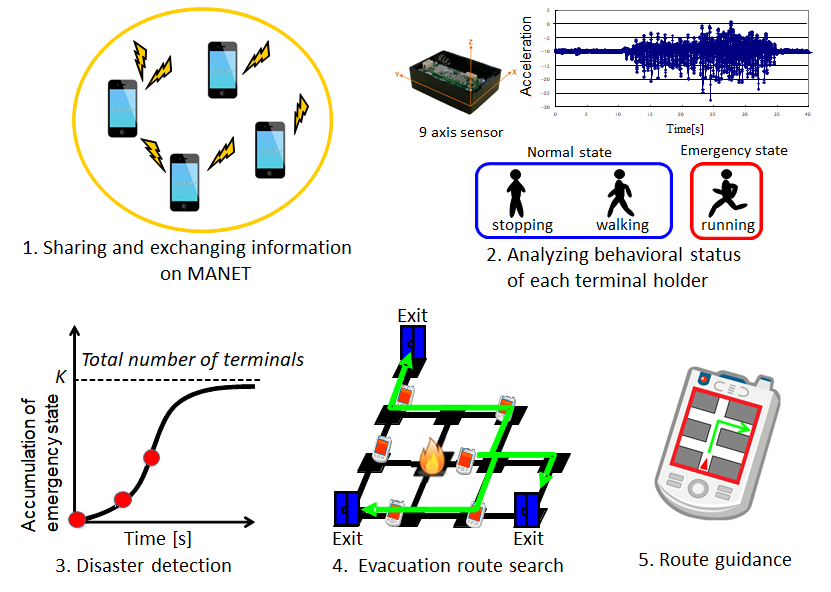
- ERESSの動作イメージ
高度道路交通システム (ITS)
~ 自動運転時代に求められる通信技術 ~
近年の安全運転支援技術の発展や高齢者による免許証の自主返納によって、死亡事故は減少傾向にあります。しかし、いまだに年間40 万件以上もの交通事故が発生しています。また、死亡事故の多くは車両と歩行者の間で多く発生しています。車両と歩行者の間に障害物がある場合、車両は直接歩行者を認識できないために衝突の危険があります。
そこで、見通し外においても衝突回避を可能とする、歩行者―車両間衝突回避支援システム(P-VCASS :Pedestrian-Vehicular Collision Avoidance System)の研究を行っています。P-VCASS ではGPS から取得した位置・速度・進行方向情報を無線通信を用いて歩行者と車両との間で交換し、歩行者と車両の相対距離を認識します。そして、P-VCASS は数秒後の相対距離を推定します。もし歩行者と衝突する可能性がある場合、運転手に警告を行います。歩行者と車両双方の情報を交換するため、P-VACSS は歩行者を含む交通事故の回避に有効であり、その可能性を追求しています。
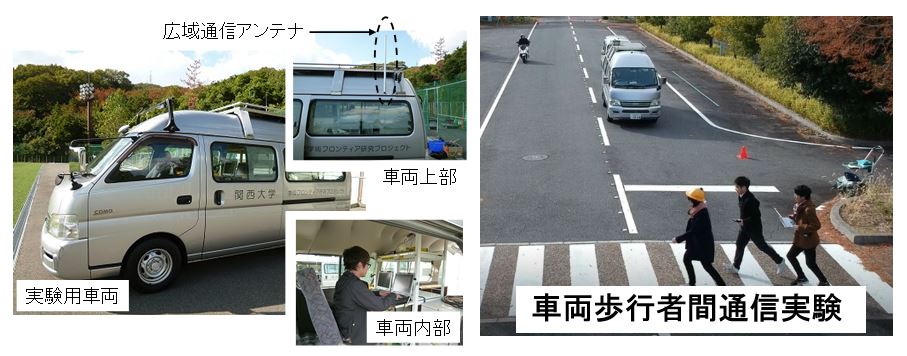
- P-VCASSによる歩行者安全支援

- 車載レーザレーダを用いたリフレクタコードの情報認識
屋内モバイルロボット
~ 無線通信技術の応用 ~
先進国を中心に急速な高齢化が進んでおり、介護者不足が問題となっています。この問題を解決するために自律移動型ロボットによる屋内型ナビゲーションシステムが注目されています。私達はRFIDシステムを用いた屋内ナビゲーションの研究を行っています。RFID システムは、無線通信を用いた個体識別技術のことで、RFIDリーダアンテナとRFID タグから構成されています。利点として、タグが安価でシステム構成が簡単であるという点があります。屋内ナビゲーションシステムの中で、移動制御は目的地まで安全に利用者を届けるために重要な要素です。モバイルロボットの自己位置推定とRFID タグの検出を組み合わせて自律的に移動できる方法について研究しています。
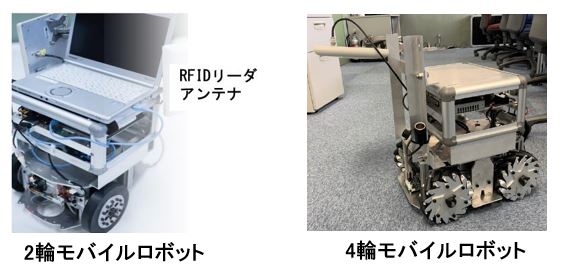
- 屋内自律モバイルロボットによるナビゲーション